

研究室紹介
- HOME
- 研究室紹介
多田隈建二郎研究室
システム理論講座 ロボット機構学グループ

革新的なロボット機構の原理創案・実機具現化
本研究室では、ロボット学分野の中でも機構の研究に一貫して取り組んでいます。移動体から把持機構まで幅広く対象とし、新規性の高い原理を創案し、実機を具現化する手法を継続しています。例えば、球状全方向車輪や円状断面クローラなど、高い段差・溝踏破能力を持つ機構や、トーラス構造を応用し、不整地に適応する移動機構、様々な形の対象物を把持するハンド機構を研究しています。これらの技術は、災害対応ロボットや医療用デバイス、福祉ロボットへの応用を目指し、位相機構学の体系化にも取り組みます。

多田隈建二郎
教授
システム解析グループ
システム理論講座 システム解析グループ

円滑なコミュニケーションを支える
システム解析技術
信号システム解析に関する理論とその応用技術について、理論と応用のバランスのとれた学生を育成することを目指し、研究と教育を行っています。具体的には、数学的理論を駆使することにより適応性・柔軟性を持つ先端的な信号システム解析手法を開発し、音声の明瞭化、能動雑音制御、画像補間、画像復元、ノイズ除去、信号特徴抽出を中心とする音声音響処理、画像処理、無線通信への応用研究に取り組んでいます。

下倉 良太 准教授
吉川雄一郎研究室
知能システム構成論講座 社会ロボット学グループ
社会の一員として
人間社会を支えるロボット
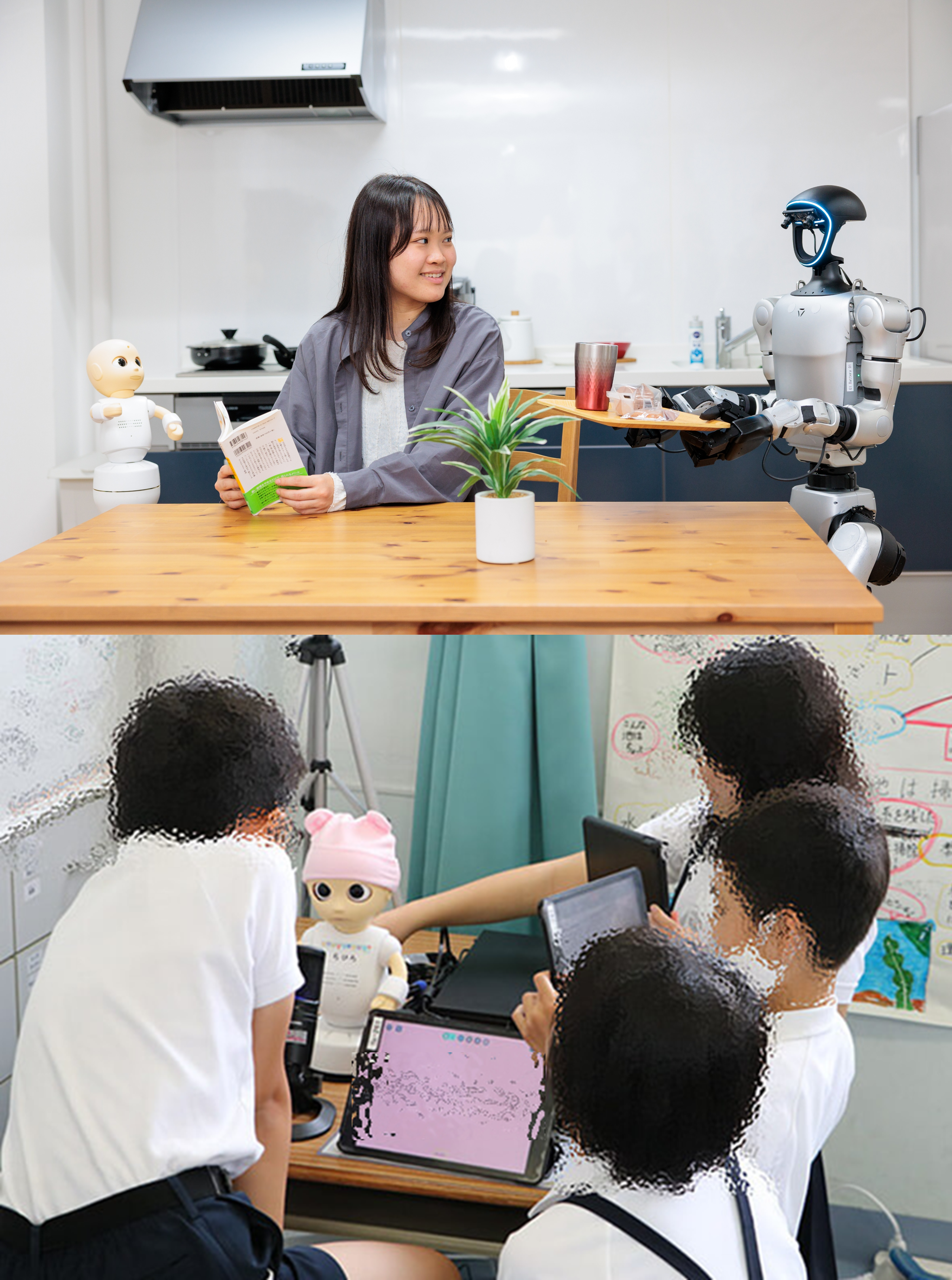
人々の健全な社会参加を支える技術として、個人に寄り添い、人と社会をつなぐ人のような社会性を備えるロボット、あるいは人々による社会性の発揮を支援するシステムの研究開発をしています。特に、社会の中で人と対話するロボットや人同士のコミュニケーションを支援する対話空間の実現、これらのメンタルヘルス支援・療育への応用に力を入れています。そしてこれらに並行し、基盤となるロボット学習技術の研究開発、感情や意識といった人間の社会性の根幹にあるメカニズムの構成論的理解といった基礎研究にも取り組んでいます。

吉川雄一郎 教授
石黒浩研究室
知能システム構成論講座 知能ロボット学グループ

ロボットを創り、人間の本質を知る
近い将来、情報・ロボット化社会は必ずやってきます。本研究室では、そのような未来に貢献するための人間社会を支える知的システムの研究開発に取り組んでいます。特に、人間と豊かに関わる人間型ロボット・アバターの研究、複数連携対話ロボットの研究、ロボットの学習機能、そして生命感・存在感の研究に力を注いでいます。また、これらの研究を通じ、人間と豊かに関わるシステムの開発に必ず伴う、「人間と何か」という基本問題に取り組んでいます。

石黒浩 教授
岩井大輔研究室
知能システム構成論講座 拡張現実グループ
リアル✕サイバーで拓く
人と世界の可能性
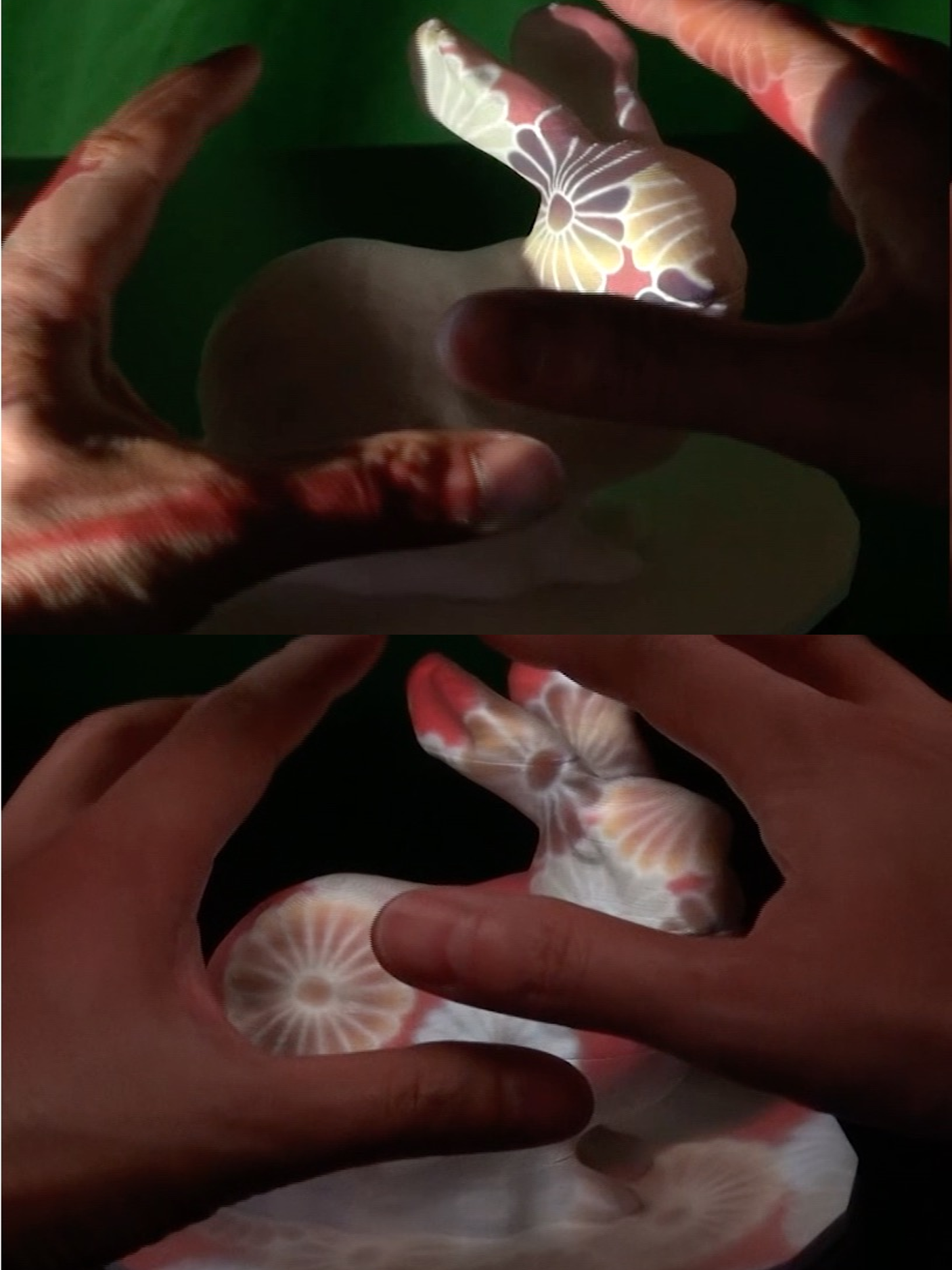
コンピュータが作り出すサイバー空間に没入するバーチャルリアリティ(VR)、バーチャル空間を現実空間と融合する拡張現実(AR)の研究開発に取り組んでいます。特に、快適でストレスなくVR/ARを体験するためのプロジェクションマッピングの技術、現実空間の情報を丸ごとキャプチャしたりそれを3次元的にそのまま再現する新たな画像センシング・ディスプレイの技術、身体に装着できるウェアラブルコンピュータを用いた人の意図のセンシングと日常生活の邪魔をしない情報提示技術といった研究に取り組んでいます。

岩井大輔 教授
原田研介研究室
知能システム構成論講座ロボットマニピュレーショングループ

ロボットによる作業の原理を解明する
ヒトの手や腕の機能をロボットで実現するためには、力学と人工知能の両面からのアプローチが必要になります。例えば、ヒトは生まれてからの経験により、日用生活品をどのように扱うかの知識を獲得しており、ロボットで日用生活品の操作を行う場合は、ヒトがもっている先見知識をどのようにしてロボットで実現するかが重要です。また、ロボットは実際に日用生活品に触れて操作しますので、どのように力を加えたらいいか、またロボットの手をどのような構造にすると、力が加えやすくなるかなどのことも考慮する必要が生じます。

原田研介 教授
櫻間一徳研究室
システム数理講座 制御情報システム研究グループ
情報化社会を支えるシステム制御理論
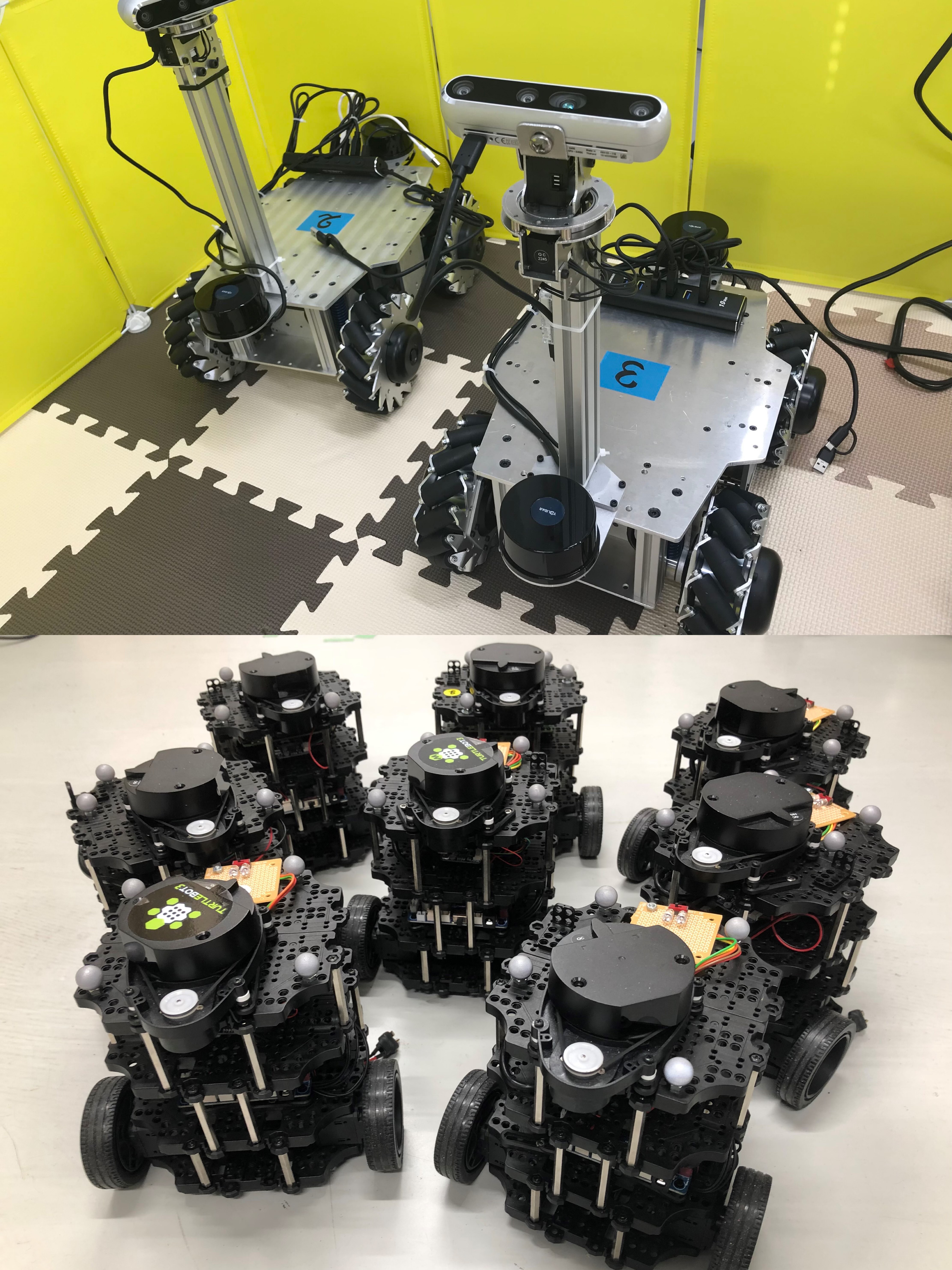
本研究室では、スマートフォン・PC・自動車・家電・住宅・ドローン・ロボットなど様々な機器が情報を介してつながったサイバーフィジカルシステムに対する基礎技術・理論の構築とその応用に関する研究を行っています。このように大規模化したシステムを効率的に制御するため、制御理論を軸に最適化・グラフ理論・群論・多様体論・ニューラルネットワークなどの数学的ツールによって課題の本質を捉えた理論体系の構築を目指しています。さらに、自律エージェント群(ロボット・ドローンなど)やスマートモビリティ(カーシェアリング・MaaSなど)への技術応用にも取り組んでいます。

櫻間一徳 教授
乾口雅弘研究室
システム数理講座 システム計画数理研究グループ

知的で柔軟なシステム計画技法の開発
本研究室では、従来の決定科学やシステム技法に加え、情報科学や知能工学を導入した知的意思決定支援技術、システム計画技法の開発を目指しています。意思決定論や数理計画法、ファジィ理論、ラフ集合、アルゴリズム論、ゲーム理論などの基礎理論を研究するとともに、これらに基づいた新しい意思決定法、システム評価手法、モデリング、最適化手法、データ解析手法、社会システム技法、分散最適化法、自律分散アルゴリズム、ソフトコンピューティングなどの開発と応用を行っています。

乾口雅弘 教授
